|
CoreDump: une razzia méthodique
Scores obtenus aux trois
premiers tours des qualifications :
7/0, 5/0 (contre le futur
finaliste !), 7/1
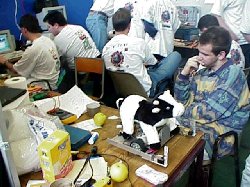
Entre chaque match:
dépouillement et analyse des "logs" du match précédent
et recherche méthodique de renseignements sur la stratégie
du prochain adversaire (étude des enregistrements vidéo,
rencontre des équipes qui líont affronté, envoi díun
agent de renseignement près de son stand, etc Ö). En fonction
de ces informations, élaboration de la stratégie d'attaque.
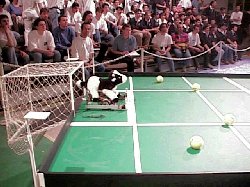
Le dernier tour des qualifications
fut un tournant pour cette valeureuse équipe. Avec cinq balles
en réserve le robot a succombé à une panne
malencontreuse, survenue devant les buts adverses. Le capitaine
d'équipe a volontairement éteint son robot dont le
moteur fumait : le match se terminait par forfait et l'autre équipe
gagnait. Leur robot était aussi bloqué que CoreDump
et ils étaient d'ailleurs ravis de l'aubaine.
Ah là là
là là !
Mais l'équipe avait
accumulé suffisamment de points pour figurer dans le tableau
final. Malheureusement, le robot, si bien réglé au
départ, n'a pas pu renouer avec le succès ... Mais
laissons Julien SERRE nous conter les dernières péripéties
:
"
En fait ce moteur qui a grillé était notre point faible,
et nous le savions avant de venir. Et ce d'autant plus que le moteur
de rechange que nous avions commandé nous a fait défaut
(à cause du fournisseur). Tout d'abord, l'ESEO nous a très
amicalement (alors qu'ils étaient eux aussi qualifiés
!) prêté les moteurs de Speedy, le robot vainqueur
de l'an dernier. On a passé une bonne partie de la nuit a
les monter et à les tester. Malheureusement leur faible couple
à bas régime et leur différence de vitesse
ne convenaient pas à notre robot. Samedi matin dans le dernier
match des qualifications le robot a glissé sur le bord et
n'a pas réussi a revenir. Finalement pour les phases finales
(malgré les deux derniers matchs loupés, nous sommes
restés 1er des qualifications jusqu'à la
fin) nous avons décidé (une erreur ?) de remettre
le moteur qui nous restait et de remplacer l'autre par un même
moteur mais qui avait montré de grands signes de faiblesse
(et qui chauffait atrocemment).
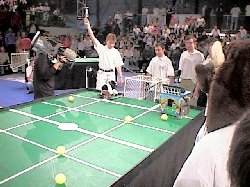
En 8eme de finale, le sort
était jeté, car nous savions que nous n'aurions pas
le temps de toucher aux moteurs entre deux matchs. Au début,
tout semble marcher à merveille : CoreDump avale comme
prévu ses quatre balles et vient se positionner devant son
but au moment même ou notre adversaire tente de tirer. Les
balles rebondissent sur la plaque de plexiglass. Une tempo de 25s
plus tard, CoreDump repart pour aller marquer ! Mais malheureusement
il finira son parcours contre la bordure.
Le match nul nous permet
d'aller en quart de finale (l'égalité se jouant au
nombre de buts marqués précédemment, nous avions
largement l'avantage).
Mais notre robot n'était
plus en état de combattre : il y avait une odeur de brûlé,
et au minimum l'engrenage de sortie moteur s'était détaché.
Avec un seul moteur, la seule chose que nous pouvions faire était
de sortir de la zone pour ne pas être forfait, et éventuellement
d'y revenir pour bloquer plus ou moins bien nos buts.
|